Body Design and Gait Generation of
Chair-Type Asymmetrical Tripedal Low-rigidity Robot
RoboSoft 2024
- Shintaro Inoue
- Kento Kawaharazuka
- Kei Okada
- Masayuki Inaba
- JSK Robotics Laboratory, The University of Tokyo, Japan
 arXiv
arXiv
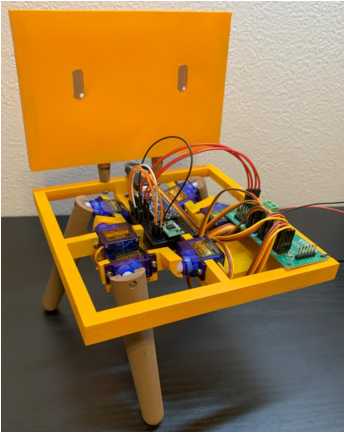
In this study, a chair-type asymmetric tripedal low-rigidity robot was designed based on the three-legged chair character in the movie "Suzume" and its gait was generated. Its body structure consists of three legs that are asymmetric to the body, so it cannot be easily balanced. In addition, the actuator is a servo motor that can only feed-forward rotational angle commands and the sensor can only sense the robot's posture quaternion. In such an asymmetric and imperfect body structure, we analyzed how gait is generated in walking and stand-up motions by generating gaits with two different methods: a method using linear completion to connect the postures necessary for the gait discovered through trial and error using the actual robot, and a method using the gait generated by reinforcement learning in the simulator and reflecting it to the actual robot. Both methods were able to generate gait that realized walking and stand-up motions, and interesting gait patterns were observed, which differed depending on the method, and were confirmed on the actual robot. Our code and demonstration videos are available here: https://github.com/shin0805/Chair-TypeAsymmetricalTripedalRobot.git
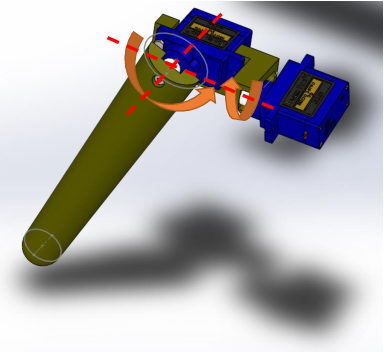
Gimbal-Type 2-DOF Leg
The gimbal-type 2-DOF leg designed in this study is shown in the figure below. The rotation axes of the two servo motors intersect at the apex of the leg, allowing the leg to move forward, backward, left, and right.
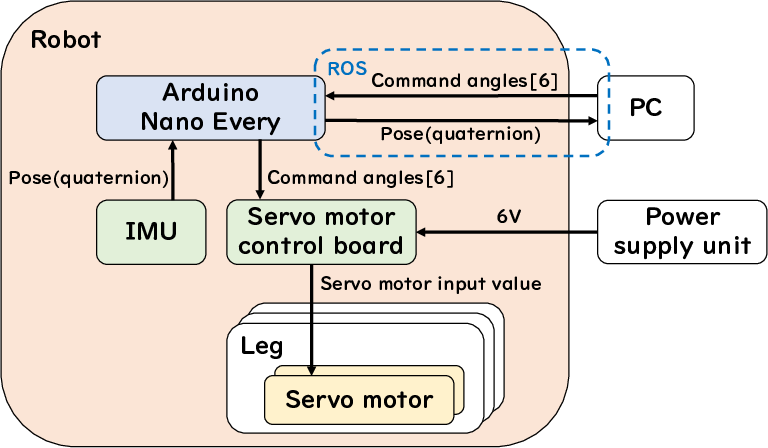
System Overview
The system configuration diagram of the robot in this study is shown in the figure below. The robot features an Arduino Nano Every that transmits command angles to six servo motors through the servo motor control board while receiving quaternions of its posture from the IMU. The Arduino Nano Every is wired for connection with an external PC, using ROS to exchange command angles and quaternions.
Gait Generation
In this study, two methods were employed to generate the gait of a chair-type asymmetric tripedal low-rigidity robot. The first method involves gait generation through connecting essential postures, while the second method involves gait generation through reinforcement learning.
Bibtex
@inproceedings{inoue2024chair,
title={{Body Design and Gait Generation of Chair-Type Asymmetrical Tripedal Low-rigidity Robot}},
author={Shintaro Inoue and Kento Kawaharazuka and Kei Okada and Masayuki Inaba},
booktitle={IEEE-RAS International Conference on Soft Robotics (RoboSoft)},
year={2024},
pages={593-600},
doi={10.1109/RoboSoft60065.2024.10522029}
}
Contact
If you have any questions, please feel free to contact Shintaro Inoue.