WiXus: A Wheeled-Legged Robot with
Wire-Driven Environmental Utilizing
to Integrate Mobility and Manipulation
ICRA 2026
 arXiv
arXiv

Abstruct
Wheeled-legged robots, which have wheels at their feet and achieve high mobility by coordinating wheel drive and leg drive, have been developed. These robots have been developed purely as platforms specialized for locomotion. Therefore, they do not have a means to repurpose their legs for roles other than locomotion, such as object manipulation or tool utilization. In this paper, we address the problem of how to draw out the potential task-execution capability of the legs by freeing them from the roles of locomotion through external body support. To this end, we propose and develop a new robot, WiXus, which fuses a wheeled-legged mechanism with a wire-driven mechanism that utilizes the external environment. The developed WiXus demonstrates not only planar locomotion with wheeled-legged drive, but also three-dimensional mobility such as cliff climbing by coordinating wire-driven and wheeled-legged actuation. Furthermore, by suspending the body with wire-driven actuation, WiXus successfully repurpose its legs as arms to perform object manipulation, (e.g., rescuing a dog (stuffed animal)), and tool utilization (e.g., harvesting an apple (mockup) with loppers). This study demonstrates that the approach of utilizing the environment with wire-driven actuation is a new design principle that extends the operational domain of wheeled-legged robots.
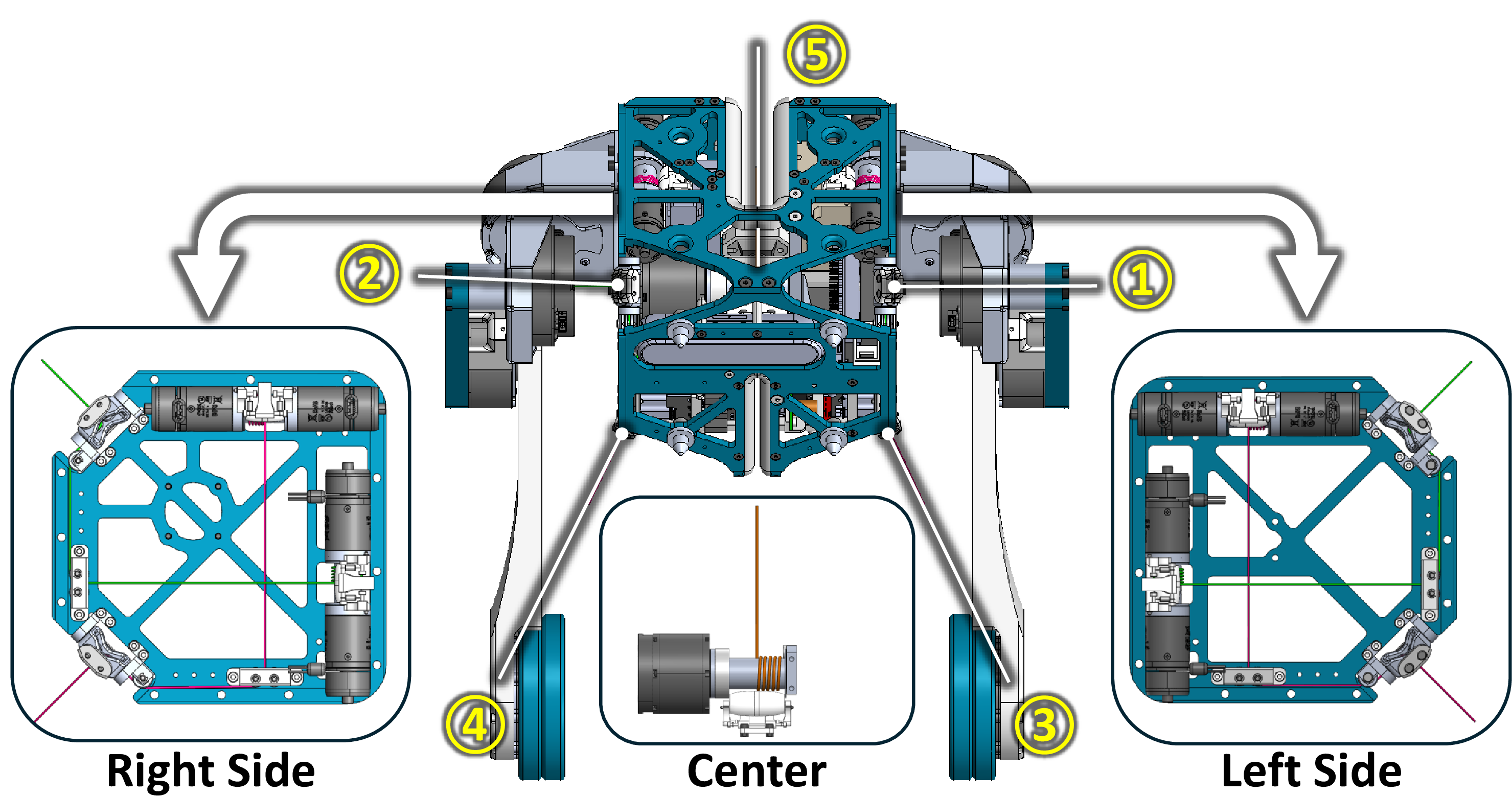
Design Overview
WiXus integrates a wheeled-legged system with a wire-driven system that anchors to the environment. It has two wheeled-legs, four wires for environmental anchoring, and one additional wire for tool attachment, enabling locomotion, three-dimensional mobility, manipulation, and tool utilization.

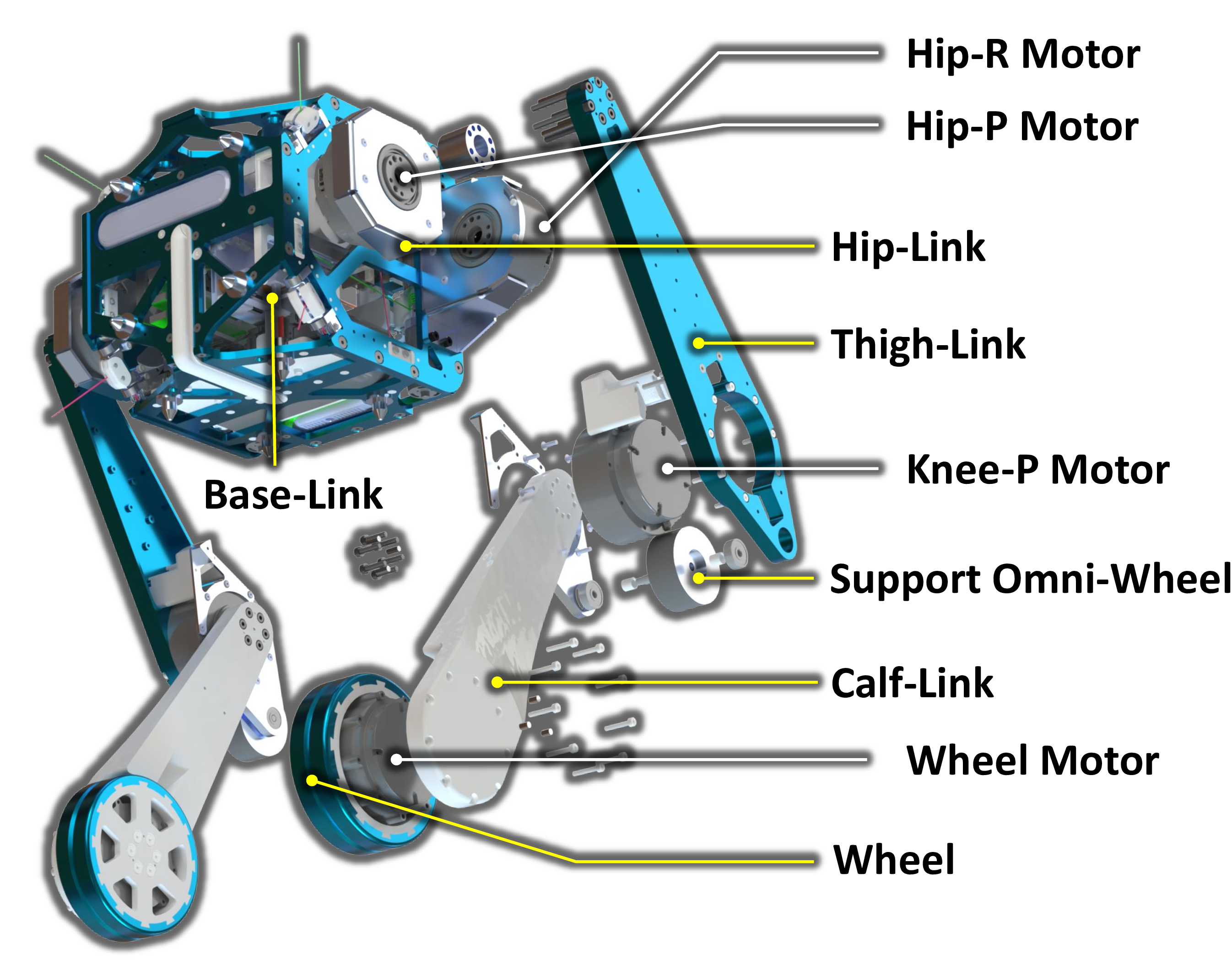
Wheeled-Leg Design
Each wheeled-leg has a 3-DOF Roll-Pitch-Pitch structure with a wheel at its tip. The legs support wheeled locomotion on the ground and are repurposed as manipulators when WiXus is suspended by wires.
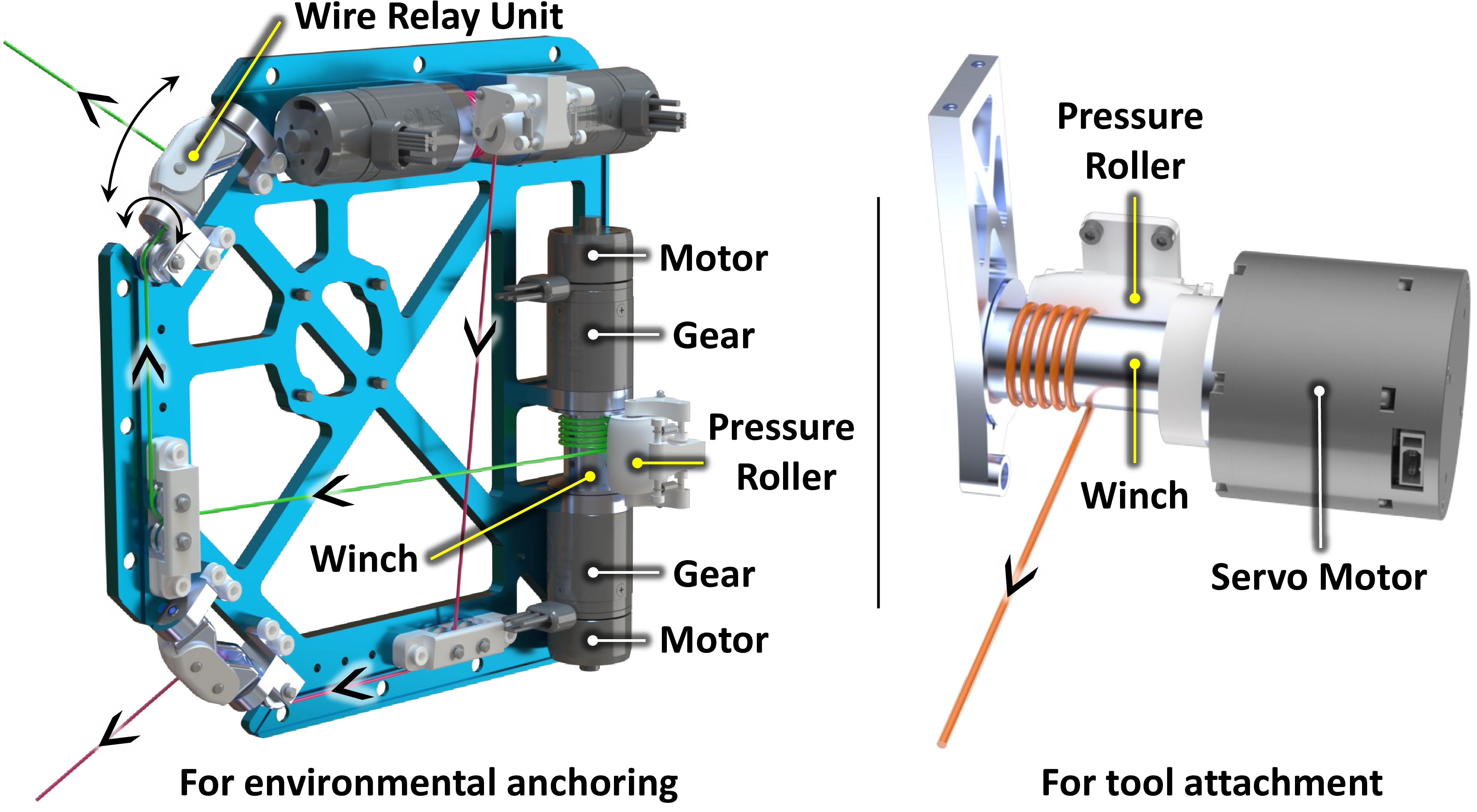
Wire Winding Module Design
WiXus has five wire winding modules: four for anchoring to the environment and one for attaching tools. The environmental anchoring modules drive the robot through wire winding, while the rear module provides stronger tension for tool attachment.
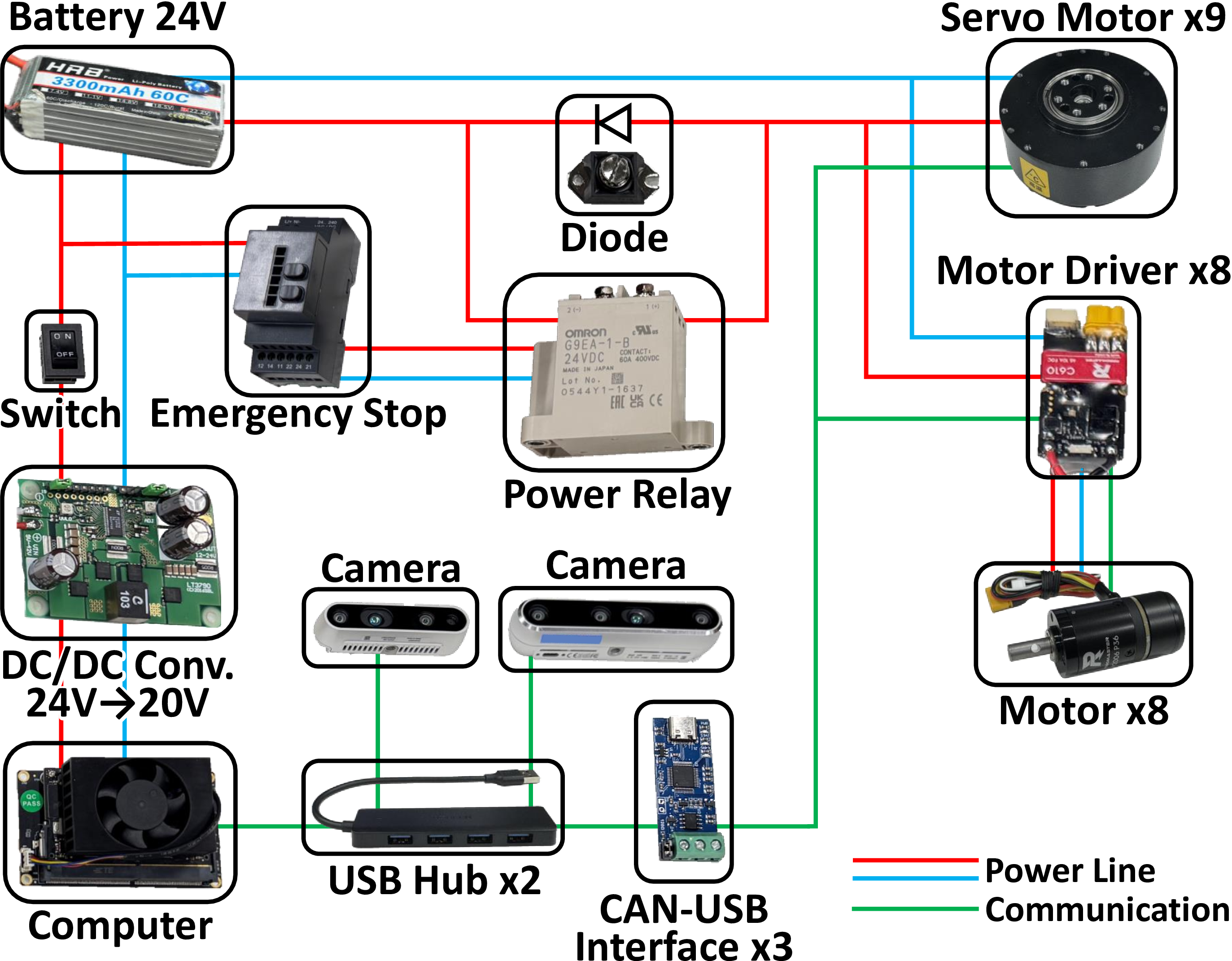
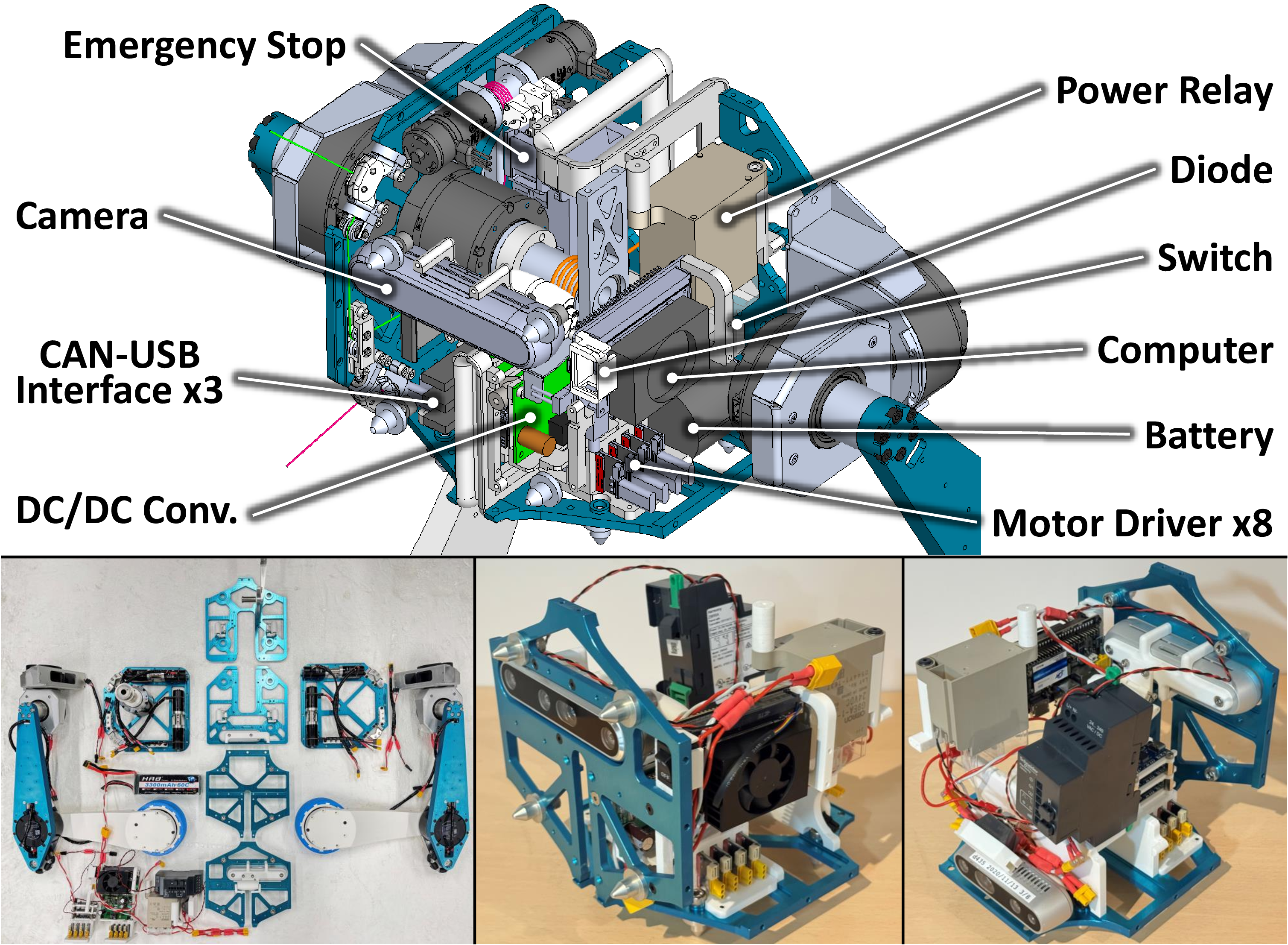
Onboard Circuits and Architecture
WiXus is controlled by an onboard Jetson Orin Nano connected to RGB-D cameras and CAN-USB interfaces. Its electronics are housed inside the main body and arranged to avoid interference with the wires.
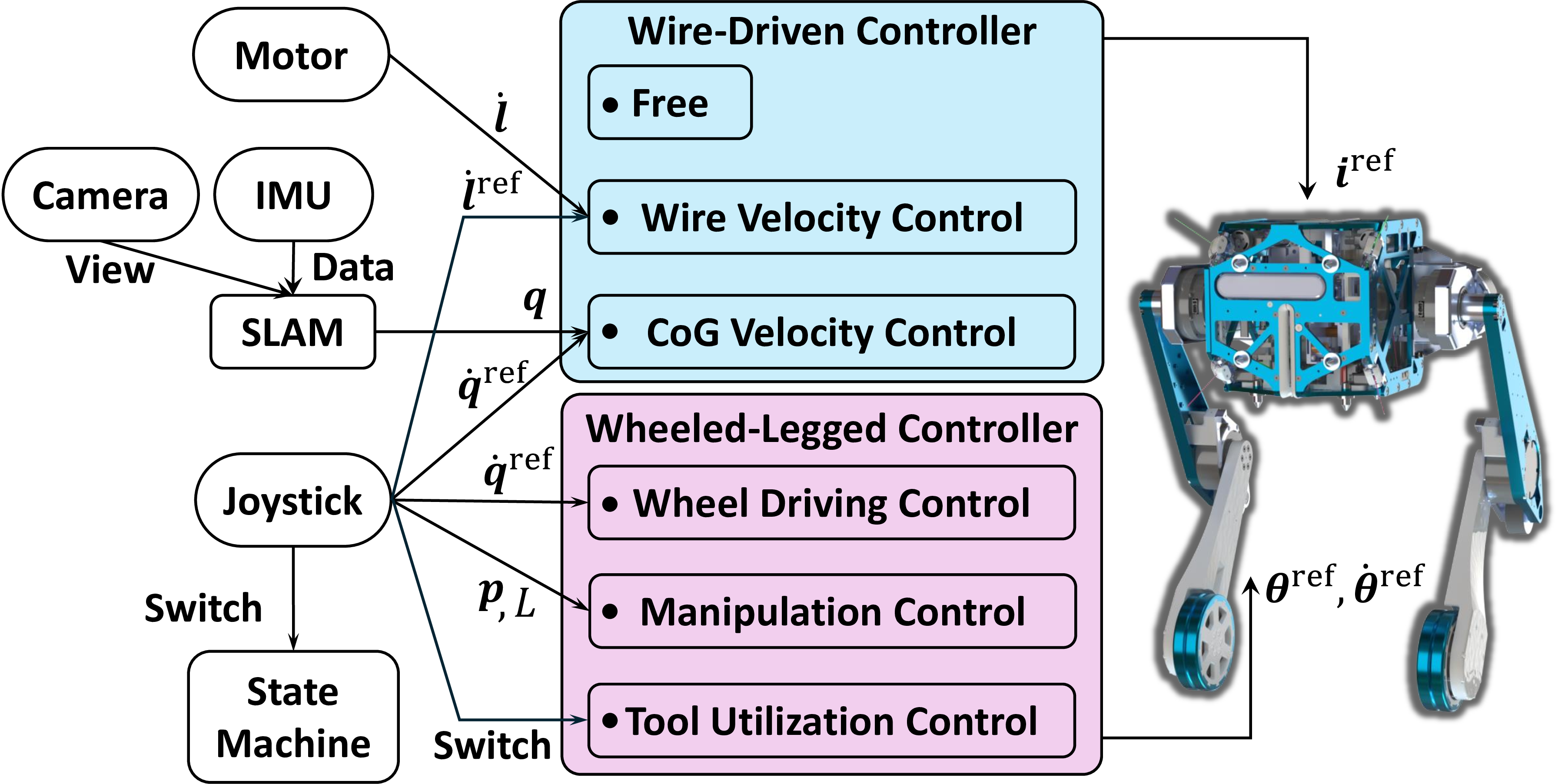
Software
The software consists of a wire-driven controller and a wheeled-legged controller running in parallel. A state machine manages mode transitions, while RTAB-Map provides SLAM using the onboard RGB-D camera.
Experiments
Mobility, manipulation, and tool-utilization demos on WiXus.
Planar Mobility and Mapping
Three-Dimensional Mobility: Cliff Climbing
Object Manipulation: A Rescue Task
Tool Utilization: Harvesting with Loppers
Bibtex
@inproceedings{inoue2026wixus,
title = {WiXus: A Wheeled-Legged Robot with Wire-Driven Environmental Utilizing to Integrate Mobility and Manipulation},
author = {Inoue, Shintaro and Kawaharazuka, Kento and Suzuki, Temma and Yuzaki, Sota and Okada, Kei},
booktitle={Proceedings of the 2026 IEEE International Conference on Robotics and Automation},
year={2026},
pages={TODO},
doi = {TODO},
}
Contact
If you have any questions, please feel free to contact Shintaro Inoue.