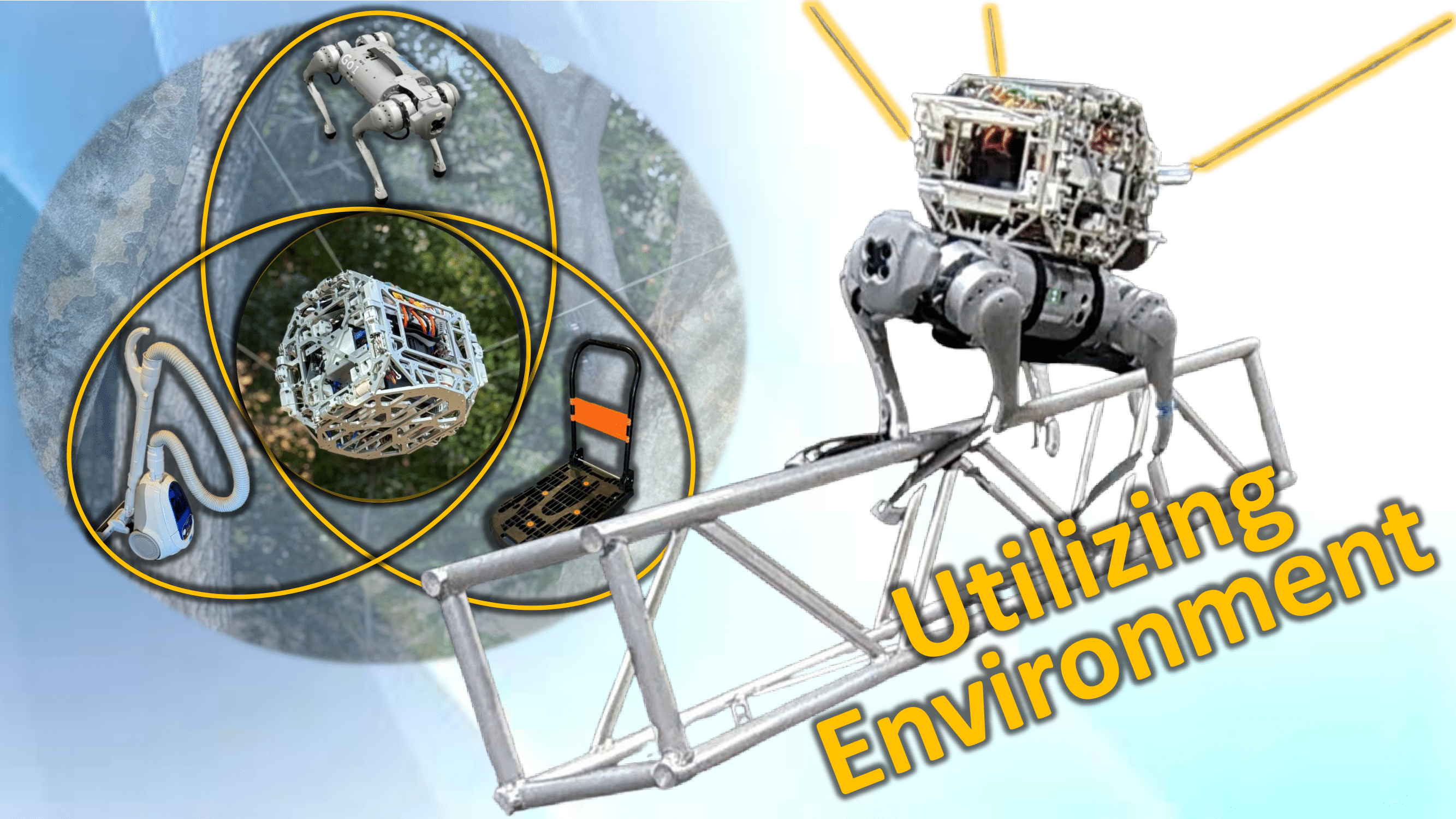
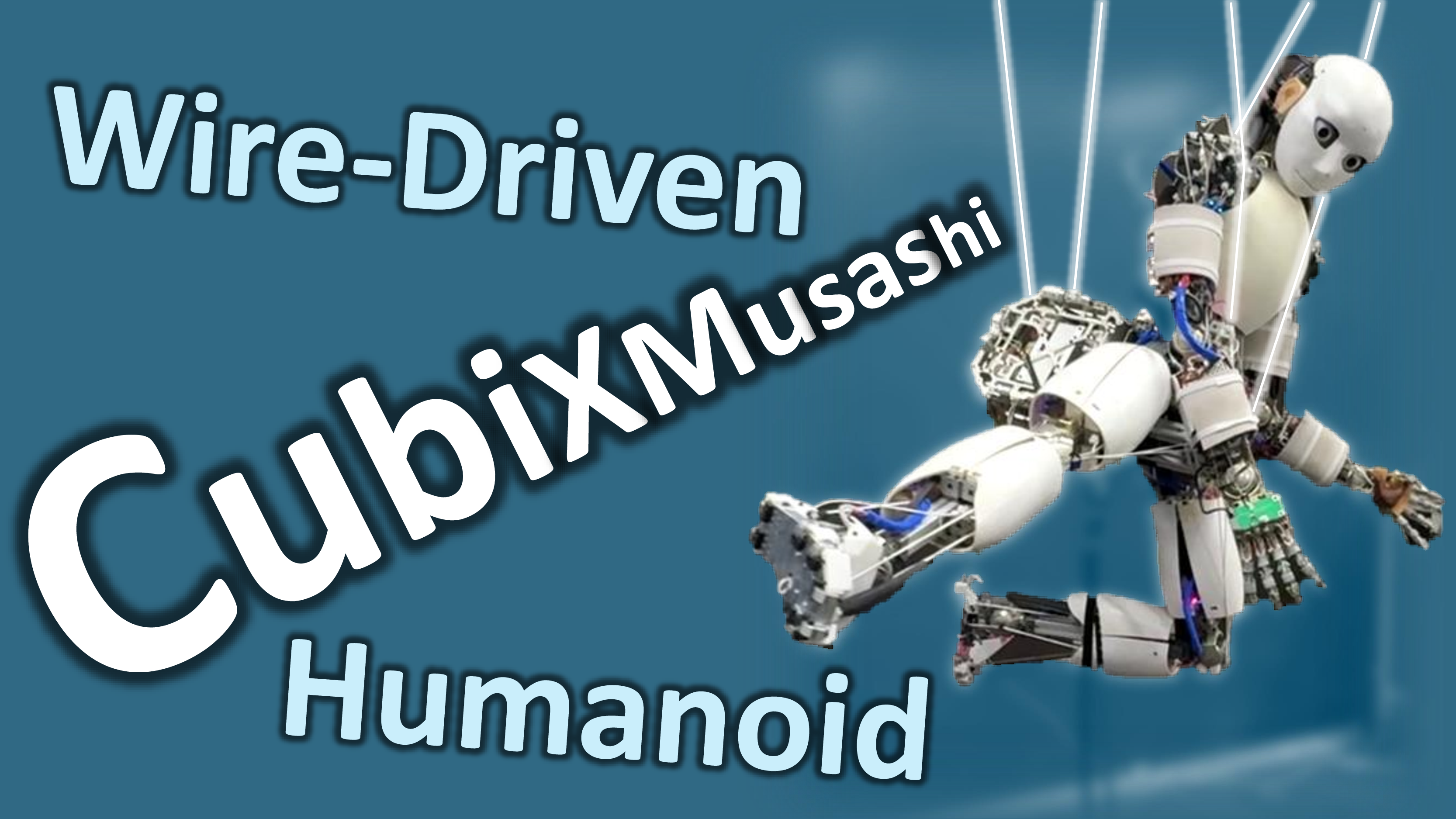
An RGB-D Camera-Based Multi-Small Flying Anchors Control for Wire-Driven Robots Connecting to the Environment
S. Inoue, K. Kawaharazuka, K. Yoneda, S. Yuzaki, Y. Sahara, T. Suzuki, K. Okada
Proceedings of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS2025)